Ergebnis
der Untersuchungen
-
Untersuchung des Auflösungsvermögens -
- Kamerauntersuchung (Laserdot/Sirius)
-
Ergebnis
der Untersuchung des Auflösungsvermögens
Bestmögliches
Auflösungsvermögen: 1,8mgon
Keine
signifikante Verschlechterung des Auflösungsvermögens
im gesamten Blickfeld.
Das
Auflösungsvermögen der hochauflösenden 5
Megapixel S/W- und Farbkamera ist annähernd gleich:
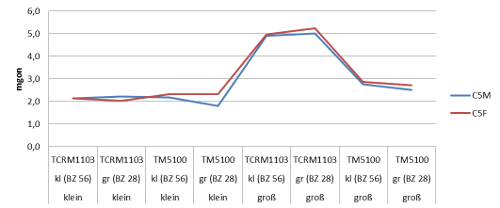
AV-Vergleich
C5M zu C5F in 18,7m Distanz
Die
unterschiedlichen Blenden haben keinen signifikanten
Einfluss auf das Auflösungsvermögen.
Die
Unterschiedlichen Fernrohre zeigen im kleinen
Blickfeld nur kleine Unterschiede.
Im großen Blickfeld jedoch, sind signifikante Unterschiede
zwischen den Fernrohren zu erkennen.
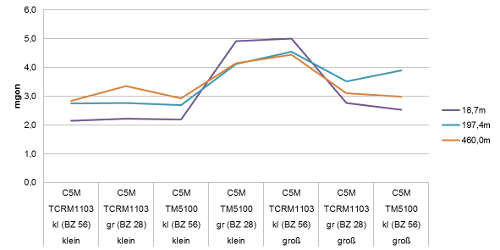
Die
Blickfelder zeigen bei dem verwendeten Theodoliten
nur geringe Unterschiede, welche bei dem Tachymeter größer
werden.
Das
Auflösungsvermögen (im Winkelmaß) wird mit zunehmender
Distanz nur leicht schlechter,
das auf die äußeren Bedingungen im freien Feld zurückzuführen
ist.
Auflösungsvermögen
in mgon auf verschiedene Distanzen
Je
geringer die Auflösung des Ergebnisbildes
wird, desto geringer wird das Auflösungsvermögen.
Dies nimmt in diesem Fall linear ab.
Das
Auflösungsvermögen bleibt bei verschiedenen Verfahren
zur Datenreduzierung und Auflösungsminimierung gleich.
Binning und Subsampling sind aufgrund
auftretender Artefakte durch Aliasing zu vermeiden.
Der
HDR-Sensor generiert ein geringeres Auflösungsvermögen
als der C1M-Sensor und dieser ein geringeres als der C5M/F-Sensor.
Dies ist vor allem auf die unterschiedlichen Auflösungen
zurückzuführen.
Zum
Seitenanfang 
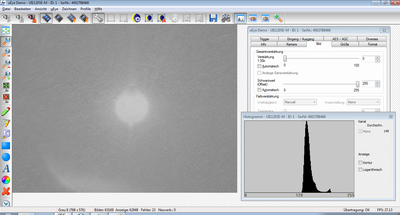
Kamerauntersuchung
(Laserdot/Sirius) Messung
auf einen Laser (TL-81)
Konfiguration: CMOS-Kamera, Tachymeter TCRM1103
Eine gute Detektion des Laserdots ist mit Verwendung des Sonnenfilters
möglich.
Laserdot TCRM1103
mit Sonnenfilter (CMOS)
Konfiguration: HDR-Kamera, Tachymeter TCRM1103
Diese Konfiguration erzeugt ohne Sonnenfilter gleiche Ergebnisse
wie eine CMOS-Kamera mit Sonnenfilter.
Laserdot TCRM1103
(HDR)
Konfiguration: CMOS-Kamera, Theodolit TM5100
Die Abbildung des Laserdots ist ähnlich der in Punkt 1 beschriebenen
Konfiguration.
Jedoch ist kein Einsatz des Sonnenfilters möglich.
Konfiguration: HDR-Kamera, Theodolit TM5100
Die Erkennung des Laserdots ist gleich der in Punkt 2 beschriebenen
Konfiguration.
Der Theodolit besitzt keine EDM-Einheit, welche zu Reflexionen
im Zentrumsbereich führen kann und ist daher zu empfehlen.
Laserdot TM5100
(HDR)
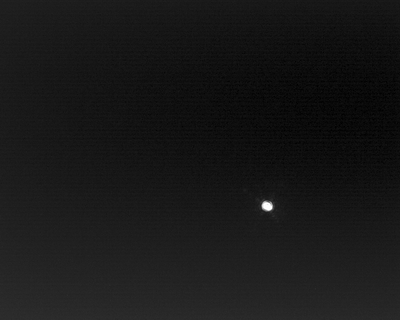
Messung auf einen Stern (Sirius)
Konfiguration: CMOS-Kamera, Tachymeter TCRM1103
Um den Stern Sirius zu erkennen ist eine hohe Belichtungszeit
nötig.
Die EDM-Einheit ist deutlich im Blickfeld zu erkennen.
Konfiguration: CMOS-Kamera, Theodolit TM5100
Die Belichtungszeit ist wesentlich geringer als in der Konfiguration
in Punkt 2.
Zudem besitzt der Theodolit keine EDM-Einheit.
Konfiguration:
HDR-Kamera, Theodolit TM5100 / Tachymeter TCRM1103
Die Ergebnisse gleichen den Konfigurationen 1 und 2.
Es ist keine Bestimmung der Belichtungszeit möglich,
jedoch kann die Bildrate im Vergleich zu den erwähnten Konfigurationen
erhöht werden.
Binning / Subsampling
Das Binning der CMOS-Kamera erhöht die Helligkeit des Bildes.
Dadurch kann die Belichtungszeit gesenkt werden. Subsampling bewirkt
keine Veränderung.
Zum
Seitenanfang
